- · 《真空科学与技术学报》[09/30]
- · 《真空科学与技术学报》[09/30]
- · 《真空科学与技术学报》[09/30]
- · 《真空科学与技术学报》[09/30]
- · 《真空科学与技术学报》[09/30]
- · 《真空科学与技术学报》[09/30]
一、稿件要求: 1、稿件内容应该是与某一计算机类具体产品紧密相关的新闻评论、购买体验、性能详析等文章。要求稿件论点中立,论述详实,能够对读者的购买起到指导作用。文章体裁不限,字数不限。 2、稿件建议采用纯文本格式(*.txt)。如果是文本文件,请注明插图位置。插图应清晰可辨,可保存为*.jpg、*.gif格式。如使用word等编辑的文本,建议不要将图片直接嵌在word文件中,而将插图另存,并注明插图位置。 3、如果用电子邮件投稿,最好压缩后发送。 4、请使用中文的标点符号。例如句号为。而不是.。 5、来稿请注明作者署名(真实姓名、笔名)、详细地址、邮编、联系电话、E-mail地址等,以便联系。 6、我们保留对稿件的增删权。 7、我们对有一稿多投、剽窃或抄袭行为者,将保留追究由此引起的法律、经济责任的权利。 二、投稿方式: 1、 请使用电子邮件方式投递稿件。 2、 编译的稿件,请注明出处并附带原文。 3、 请按稿件内容投递到相关编辑信箱 三、稿件著作权: 1、 投稿人保证其向我方所投之作品是其本人或与他人合作创作之成果,或对所投作品拥有合法的著作权,无第三人对其作品提出可成立之权利主张。 2、 投稿人保证向我方所投之稿件,尚未在任何媒体上发表。 3、 投稿人保证其作品不含有违反宪法、法律及损害社会公共利益之内容。 4、 投稿人向我方所投之作品不得同时向第三方投送,即不允许一稿多投。若投稿人有违反该款约定的行为,则我方有权不向投稿人支付报酬。但我方在收到投稿人所投作品10日内未作出采用通知的除外。 5、 投稿人授予我方享有作品专有使用权的方式包括但不限于:通过网络向公众传播、复制、摘编、表演、播放、展览、发行、摄制电影、电视、录像制品、录制录音制品、制作数字化制品、改编、翻译、注释、编辑,以及出版、许可其他媒体、网站及单位转载、摘编、播放、录制、翻译、注释、编辑、改编、摄制。 6、 投稿人委托我方声明,未经我方许可,任何网站、媒体、组织不得转载、摘编其作品。
陈根:模块化软体机器人,真空驱动柔性关节
作者:网站采编关键词:
摘要:文/陈根相较于刚性机器人,柔性机器人展现出了其所不具备的优势。柔性机器人具有不同的软硬件体系结构:每个关节都配置力传感器,并且底层控制体系结构由原来的位置控制,转变
文/陈根相较于刚性机器人,柔性机器人展现出了其所不具备的优势。柔性机器人具有不同的软硬件体系结构:每个关节都配置力传感器,并且底层控制体系结构由原来的位置控制,转变为力和位置融合控制,使机器人兼具高精度位置控制和高动态力控制。当前,柔性材料的软机器人已广泛应用于各个领域。在许多情况下,为了完成紧急任务(如救援),需要快速制造出适合的软体机器人。现在,浙江大学工程学院教授邹俊就基于刚性机器人仍存在的局限,开发出了一个真空驱动的柔性机器人。
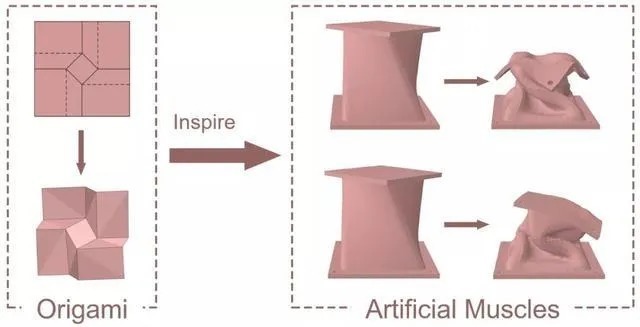
一开始,研究人员提出一种刚柔结合的设计方案?,即用一个真空驱动的柔性扭转执行器(V-SPTA,Vacuum-Powered Soft Pneumatic Twisting Actuators)作为软体机器人的 “柔性关节”。真空动力软气动执行器(V‐SPAs)是一种有前景的新兴应用技术,包括人造肌肉、可编程运动和柔性抓手。它们具有灵活的变形、清洁的供电、与用户安全的交互等优点。但是,在机器的构造方面,研究人员依然采用传统的方式,以至于出现了在给软体机器人吸气的时候,机器人无法把运动完全分离开的情况。在此基础上,研究人员进一步改进。在进一步实验设计中,研究人员通过模块组合将复合运动解耦,实现了单个运动。并且,又模仿传统折纸艺术千纸鹤的折叠运动,设计出一种流体驱动的全柔性人工肌肉。这种人工肌肉可以用于不同的软机器人的快速重构,就像“积木”一样。

一开始,研究人员提出一种刚柔结合的设计方案?,即用一个真空驱动的柔性扭转执行器(V-SPTA,Vacuum-Powered Soft Pneumatic Twisting Actuators)作为软体机器人的 “柔性关节”。真空动力软气动执行器(V‐SPAs)是一种有前景的新兴应用技术,包括人造肌肉、可编程运动和柔性抓手。它们具有灵活的变形、清洁的供电、与用户安全的交互等优点。但是,在机器的构造方面,研究人员依然采用传统的方式,以至于出现了在给软体机器人吸气的时候,机器人无法把运动完全分离开的情况。在此基础上,研究人员进一步改进。在进一步实验设计中,研究人员通过模块组合将复合运动解耦,实现了单个运动。并且,又模仿传统折纸艺术千纸鹤的折叠运动,设计出一种流体驱动的全柔性人工肌肉。这种人工肌肉可以用于不同的软机器人的快速重构,就像“积木”一样。
文章来源:《真空科学与技术学报》 网址: http://www.zkkxyjsxb.cn/zonghexinwen/2021/0309/544.html